Model Factory – szkolenie z wykorzystaniem kompaktowej linii produkcyjnej
OPIS
Zapraszamy do praktycznego zapoznania się z technologiami Przemysłu 4.0 podczas szkolenia prowadzonego przez specjalistów z Politechniki Wrocławskiej z wykorzystaniem Model Factory, czyli kompaktowej linii produkcyjnej, która umożliwi Ci poznanie takich technologii jak: robotyka współpracująca, autonomiczne roboty mobilne, rozszerzona (AR) i wirtualna (VR) rzeczywistość oraz sztuczna inteligencja w zastosowaniach diagnostycznych. Wszystkie te rozwiązania mogą pomóc Twojej firmie wejść na wyższy poziom innowacji.
DLACZEGO WARTO WZIĄĆ UDZIAŁ W WYDARZENIU?
Podczas szkolenia poznasz rzeczywiste zastosowanie technologii Przemysłu 4.0 oraz zdobędziesz praktyczne doświadczenie w ich wykorzystaniu.
DLA KOGO PRZEZNACZONE JEST SZKOLENIE?
Szkolenie przeznaczone jest dla wszystkich osób zainteresowanych wdrażaniem nowoczesnych technologii w swojej firmie w celu wejścia na wyższy poziom innowacji!
OPIS TRENERA
- Bartosz Poskart – specjalista z zakresu zaawansowanej robotyki, tworzenia oprogramowania w językach wysokiego poziomu, przetwarzania obrazu, prototypowania oraz automatyzacji maszyn i urządzeń. Pracując w Katedrze Technologii Laserowych, Automatyzacji i Organizacji Produkcji na Wydziale Mechanicznym Politechniki Wrocławskiej, realizuje prace badawcze i rozwojowe związane z zaawansowanymi integracjami robotów przemysłowych, współpracujących, mobilnych i obrabiarek sterowanych numerycznie w Przemysłowym Internecie Rzeczy IIoT.
- Grzegorz Iskierka – pracownik badawczo-dydaktyczny w Katedrze Technologii Laserowych, Automatyzacji i Organizacji Produkcji Politechniki Wrocławskiej. Specjalista z zakresu programowania i integracji robotów przemysłowych, mobilnych i współpracujących, rozwiązań z dziedziny Przemysłowego Internetu Rzeczy oraz wytwarzania oprogramowania w językach wysokiego poziomu.
AGENDA
- 12:30 – 13:00
Prezentacja Model Factory
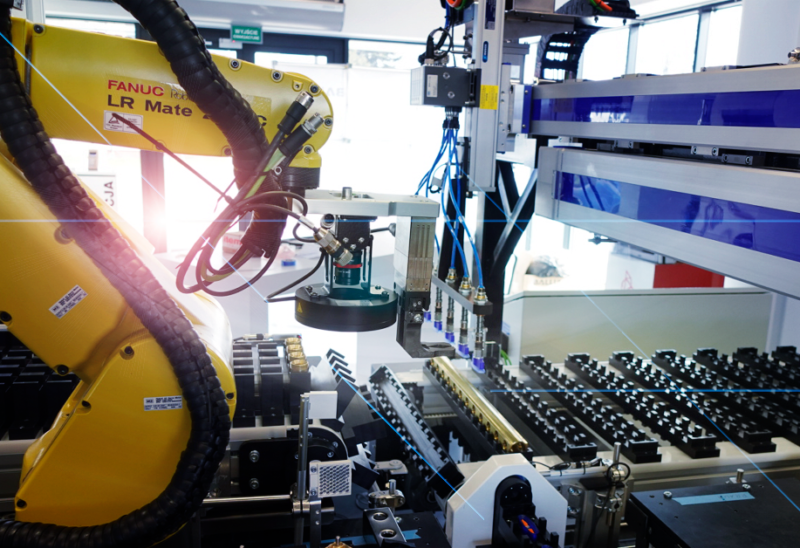
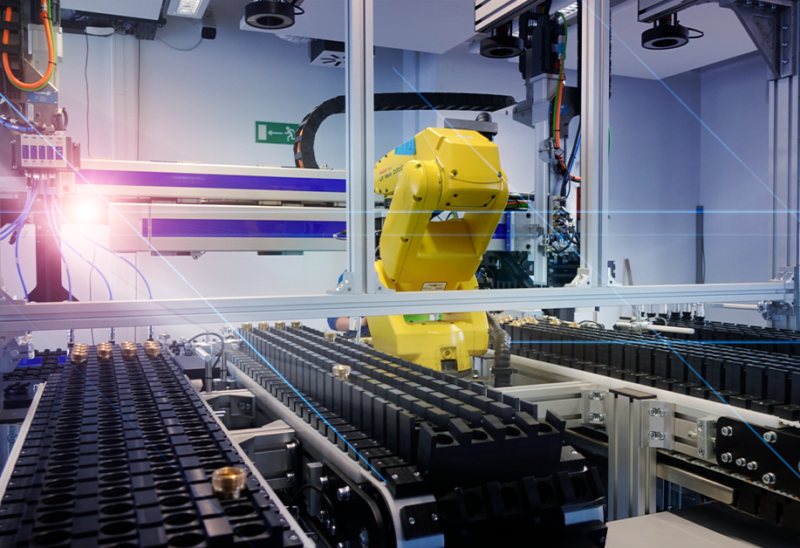
Przygotowany przez nas demonstrator Przemysłu 4.0 jest kompaktową linią produkcyjną, na przykładzie której demonstrujemy zarówno powszechnie stosowane rozwiązania automatyki i robotyki, jak i nowoczesne technologie zgodne z ideą czwartej rewolucji przemysłowej. Prezentowane technologie to między innymi robotyka współpracująca, autonomiczne roboty mobilne, rozszerzona (AR) i wirtualna (VR) rzeczywistość oraz sztuczna inteligencja w zastosowaniach diagnostycznych. Ponadto, demonstrator udostępnia aktualne oraz historyczne dane poprzez protokół OPC-AU, umożliwiając zamodelowanie jego cyfrowego bliźniaka. Wszystkie z zastosowanych technologii Przemysłu 4.0 wspólnie tworzą nasz demonstrator, natomiast każda z nich może zostać wykorzystana również w Twojej linii produkcyjnej!
- 13:00 – 13:45
Roboty przemysłowe
Roboty przemysłowe z powodzeniem wykorzystywane są do wykonywania monotonnych operacji na stanowiskach uciążliwych lub niebezpiecznych dla człowieka, zwiększając jednocześnie wydajność oraz precyzję wykonywanych zadań.
- 13:45 – 14:30
Systemy wizyjne
Systemy wizyjne poprzez analizę kształtu, koloru, kodów 1D i 2D, czy tekstu umożliwiają zadania takie jak kontrola jakości, sortowanie elementów, przekazywanie pozycji detali do systemów sterowania manipulatorów, rozpoznawania obiektów i wielu innych zadań, które mogłyby się wydawać możliwej jedynie dla człowieka.
- 14:30 – 15:00
Przerwa
- 15:00 – 15:45
Roboty współpracujące
Coboty najczęściej kojarzone są z brakiem wymogu stosowania barier ochronnych i pracy “ramię w ramię” z pracownikiem. Cechą charakterystyczna robotów współpracujacych jest zapewnienie maksymalnego bezpieczeństwa operatora poprzez zastosowanie szeregu wbudowanych w strukturę robota czujników bezpieczeństwa oraz redukcję prędkości i siły maksymalnej. Wszystko to zapewnia bezpieczne zatrzymanie robota podczas kolizji i minimalizację jej skutków. niezwykle ważny jest również aspekt ekonomiczny wdrażania cobotów, ponieważ czas zwrotu inwestycji (ROI) może wynosić nawet poniżej 1 roku!
- 15:45 – 16:30
Autonomiczne roboty mobilne
Autonomiczne roboty mobilne są urządzeniami nie wymagającymi żadnej dodatkowej infrastruktury wewnątrzzakładowej do nawigacji w przestrzeni. Trasa przejazdu podczas wykonywania zaprogramowanych zadań wyznaczana jest na podstawie zeskanowanej wcześniej mapy otoczenia. Podczas przejazdu, na bieżąco analizowane jest najbliższe otoczenie robota mobilnego w celu przeszkód stałych lub ruchomych. Wielu producentów oferuje również możliwość integracji autonomicznych robotów mobilnych z robotem współpracującym.